
托盘翻转全自动装车机的工作原介绍
托盘翻转全自动装车机是一种高度自动化、智能化的物流装卸设备,旨在替代传统的人工或叉车装卸方式,极大地提高了效率、安全性和空间利用率。
核心设计理念
它的核心设计理念是:将水平放置的单元化货物(通常是码放在托盘上的纸箱、袋装物等),通过一个翻转机构,使其变为垂直状态,然后有序地、紧密地码放到运输车辆的车厢内。
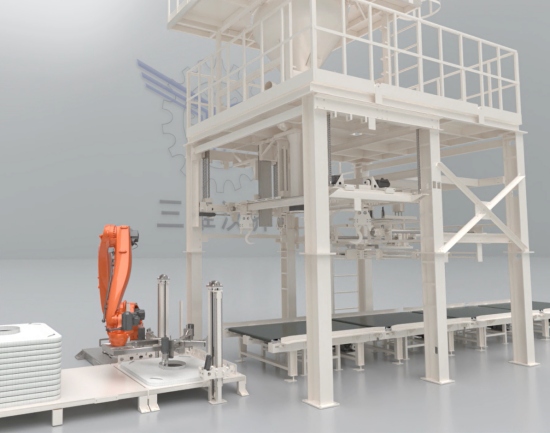
系统主要组成部分
要理解其工作原理,首先需要了解它的几个关键部分:
1.入库输送线:负责将满载货物的托盘从仓库输送至翻转机工位。
2.托盘定位与夹抱机构:在翻转前,对托盘进行精确定位,并用夹抱臂牢牢固定住整垛货物,防止在翻转过程中散落。
3.翻转机构:整个设备的核心。通常是一个巨大的“回旋臂”或“翻转平台”,它能将夹抱住的货物整体平稳地翻转90度,从水平变为垂直。
4.拆盘/分层机构:货物翻转垂直后,需要将其从托盘上取下。常见的方式有:
推板式:一个推板将整层货物从托盘上推出,送至装车臂。
吸盘式:机器人或机械臂使用真空吸盘,一次吸取一层或单个货物。
夹抱式:用夹具将整层货物夹取移走。
5.装车执行机构(机械臂/滑台):接收从拆盘机构送来的货物,并将其精确地放置到车厢内的指定位置。这可以是一个多自由度的工业机器人,或一个能在三维空间移动的龙门架系统。
6.智能控制系统:设备的“大脑”。通常包括:
PLC(可编程逻辑控制器):控制所有动作的顺序和逻辑。
3D视觉系统:对车厢内部进行扫描,建立三维模型,识别车厢尺寸、位置以及已码放货物的形状。
运动控制软件:根据视觉系统的数据和预设的码垛算法,计算出最优的码放路径和顺序。
详细工作流程(分步解析)
整个过程可以概括为 “进、翻、取、放、码”五个步骤:
第一步:自动上料与定位
满载货物的托盘通过输送线被运送到翻转工位。光电传感器或视觉系统检测托盘到位后,输送线停止。两侧或上方的夹抱机构动作,将整垛货物紧紧抱住,确保其稳定性。
第二步:整体平稳翻转
夹抱机构锁定后,翻转机构开始动作。它带动整个夹抱机构和其上的货物,作为一个刚性整体,缓慢而平稳地旋转90度。此时,原本在底部的托盘变成了在货物的“背后”,而货物的侧面则变成了朝向车厢的“装载面”。这个过程要求非常平稳,加速度控制精准,以防货物失稳或倒塌。
第三步:分离货物与托盘
货物翻转到位后,拆盘/分层机构开始工作。
如果是推板式,推板会向前运动,将最前面的一层货物从托盘上“推”到等待的装车臂或传送带上,同时后面的货物被挡板挡住。托盘则被保留在翻转机构上。
如果是吸盘式,吸盘机械臂会移动到货物表面,吸附住最前面的一层,然后将其“取”走。
第四步:智能识别与路径规划
与此同时,安装在装车平台上的3D摄像头会对停靠的货车车厢进行扫描。系统获取车厢的实际尺寸、内部障碍物(如突出的棱角)、以及已码放货物的轮廓。控制软件根据这些实时数据,结合货物的尺寸,智能计算出最优的码放方案:
码放顺序:先放哪,后放哪。
码放:如何交错堆叠以增加稳定性。
避障路径:机械臂如何移动才能不碰撞到车厢壁和已码放的货物。
第五步:精准抓取与码放
装车机械臂(或龙门架)从拆盘工位接取到货物(一层或一箱),然后严格按照规划好的三维运动轨迹,将货物精准地放置到车厢内的目标位置。机械臂可以灵活地调整姿态,将货物“塞”进狭窄的空间,实现紧密堆叠。
第六步:循环与复位
当一层货物被取走后,翻转机构可能会有一个微小的推送动作,使下一层货物就位,等待下一次抓取。
当整个托盘上的货物被全部取完时,空的托盘会被释放,通过回流输送线送回仓库。同时,新的满载托盘被送入,开始下一个循环。
机械臂会持续工作,直到整个车厢按照预设方案装满为止。

主要技术优势
1.极高的效率:连续自动化作业,速度远超人工,可24小时不间断运行。
2.超高的空间利用率:货物垂直码放,可以充分利用车厢的高度空间,实现“顶天立地”式的装载,装载率可达95%以上。
3.无人化操作:完全替代了繁重、重复且有一定危险性的人工装卸作业,降低了人工成本和工伤风险。
4.货物损伤率低:平稳的夹抱、翻转和精准的机械臂放置,避免了人工搬运中的抛掷、碰撞,有效保护了货物。
5.数据化和柔性化:通过3D视觉和智能算法,能自适应不同的车型、货物尺寸和包装形式,实现柔性化生产。同时,可以记录每一车的装载数据,便于管理。
应用场景
主要用于需要高效率、大批量装车的行业,如:
食品饮料行业(箱装饮料、零食)
化工行业(袋装化肥、饲料)
家电行业(箱装空调、洗衣机)
造纸行业(纸箱、卷纸)
物流快递分拨中心
托盘翻转全自动装车机通过将 “水平堆垛”巧妙地转换为 “垂直码放”,并结合 机器人技术和 机器视觉,完美地解决了装车环节的自动化难题,是现代智能物流系统中至关重要的一环。
- 上一篇:吨袋全自动包装机助力锂电池材料企业高质量发展
- 下一篇:包装机常见的配套设备有哪些?









 鲁公网安备 37040202006018号
鲁公网安备 37040202006018号
